Tether-Inertial Localization for Drones on Mars

TL;DR: We present a Tether-Inertial Localization approach that uses tether length and angle measurements to estimate the UAV pose relative to its base. The method combines an analytical catenary model with a Gaussian Process residual correction, achieving 0.049 m average RMSE with tether lengths up to 4.5 m—enabling robust position control for tethered drones in feature-sparse environments such as Mars.
Overview

Contributions
- Analytical catenary model for computationally efficient estimation of the Tethered UAV (TUAV) position and its uncertainty.
- Gaussian Process trained from pairs of tether states and residual errors, to compensate non-linear effects causing discrepancies between the analytical position estimate and ground truth.
- Experimental validation of the Tether-Inertial Localization approach using a custom-built Tether Management System (TMS), with circular, triangular, and figure-eight trajectories, tether lengths up to 4.5 m, and 41 minutes of flight time using only tether-based position feedback.
Methods
The physical connection between the base and the drone generates a geometric constraint on the position of the drone: it can only be at a location consistent with the tether state. We model the tether as an idealized hanging chain (catenary), with four degrees of freedom identified by tether length, base elevation and azimuth angle, and drone elevation angle. The catenary model assumes negligible bending stiffness, uniform mass distribution, and quasi-static conditions. To capture model violations and non-linear effects under dynamic conditions, we train a Sparse Gaussian Process on the residual error between the catenary-based position estimate and ground truth, improving accuracy under real flight conditions.
Experimental results show 0.073 m average RMSE for the analytical catenary model alone and 0.049 m average RMSE with GP enhancement—an order of magnitude improvement over prior tether-based localization methods—enabling precise position control for tethered drones without vision or GNSS.
Conclusion
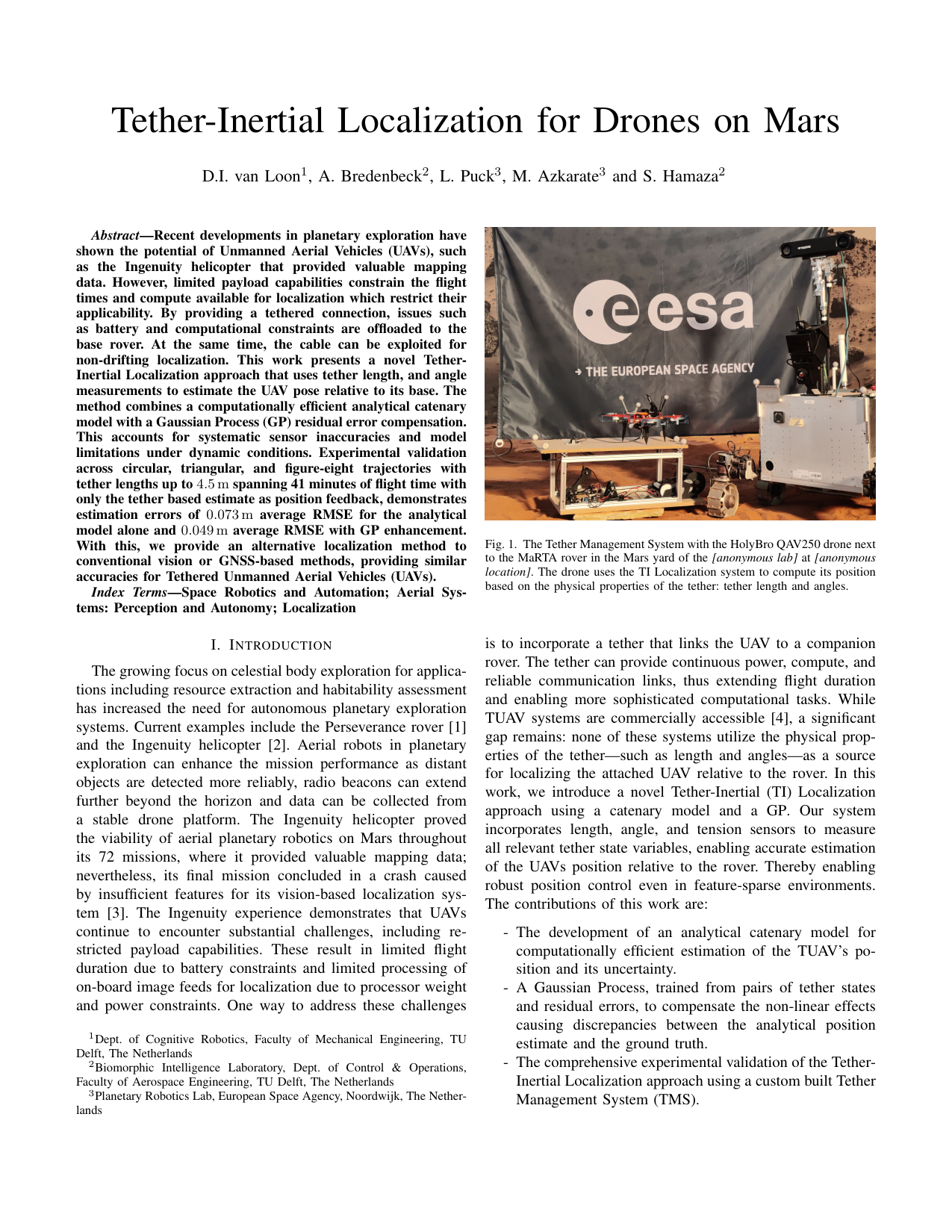
By combining an efficient analytical catenary model with data-driven GP residual correction, we provide a practical localization method for Tethered Unmanned Aerial Vehicles in GNSS-denied, feature-sparse environments such as planetary surfaces. The approach is validated on a custom Tether Management System with the HolyBro QAV250 drone alongside the MaRTA rover in a Mars yard, demonstrating that tether-inertial localization can achieve accuracies sufficient for closed-loop position control and future planetary exploration missions.
BibTeX
The website template was adapted from John Barron and Michaël Gharbi.