|
|

|
|
|
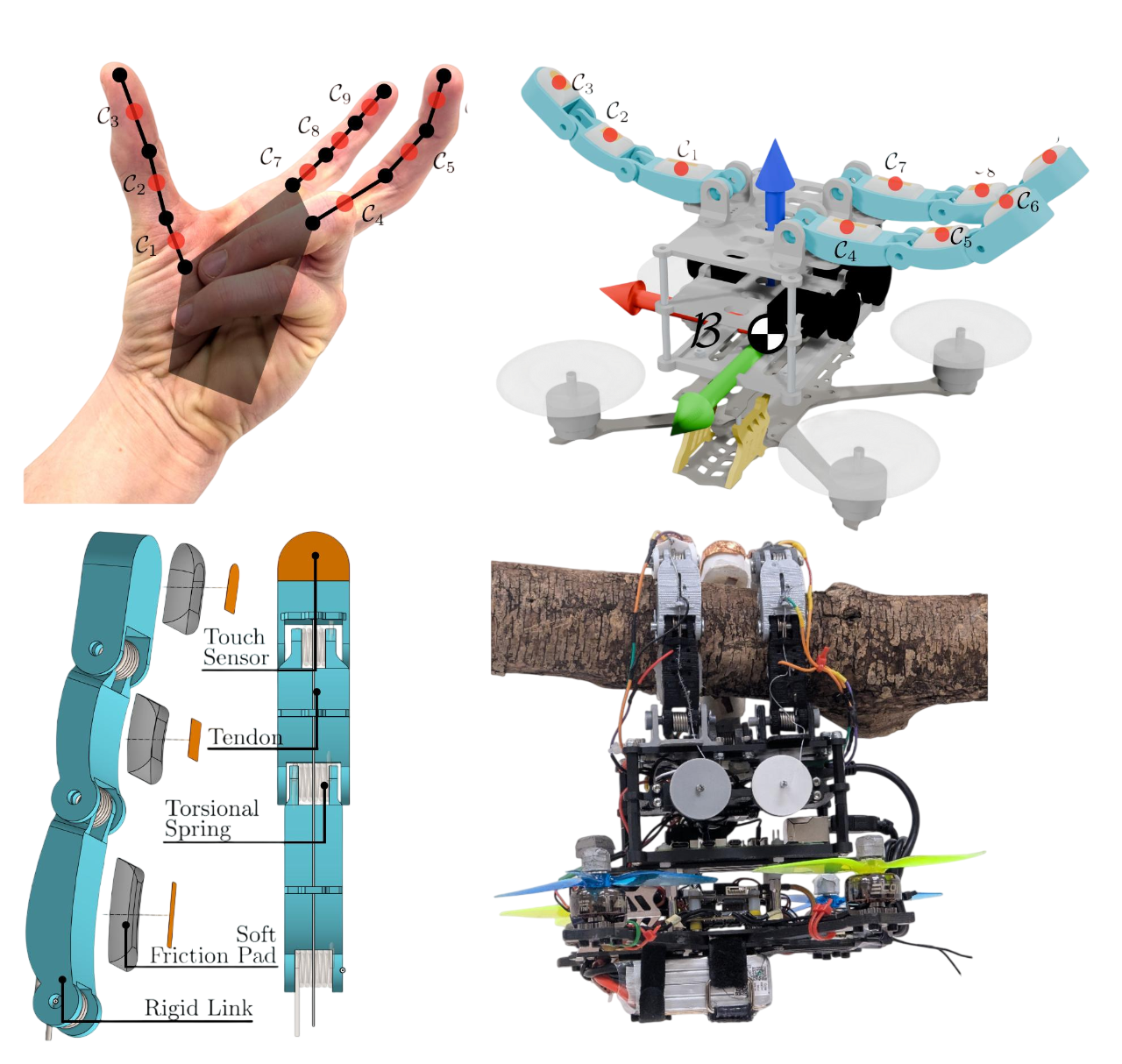
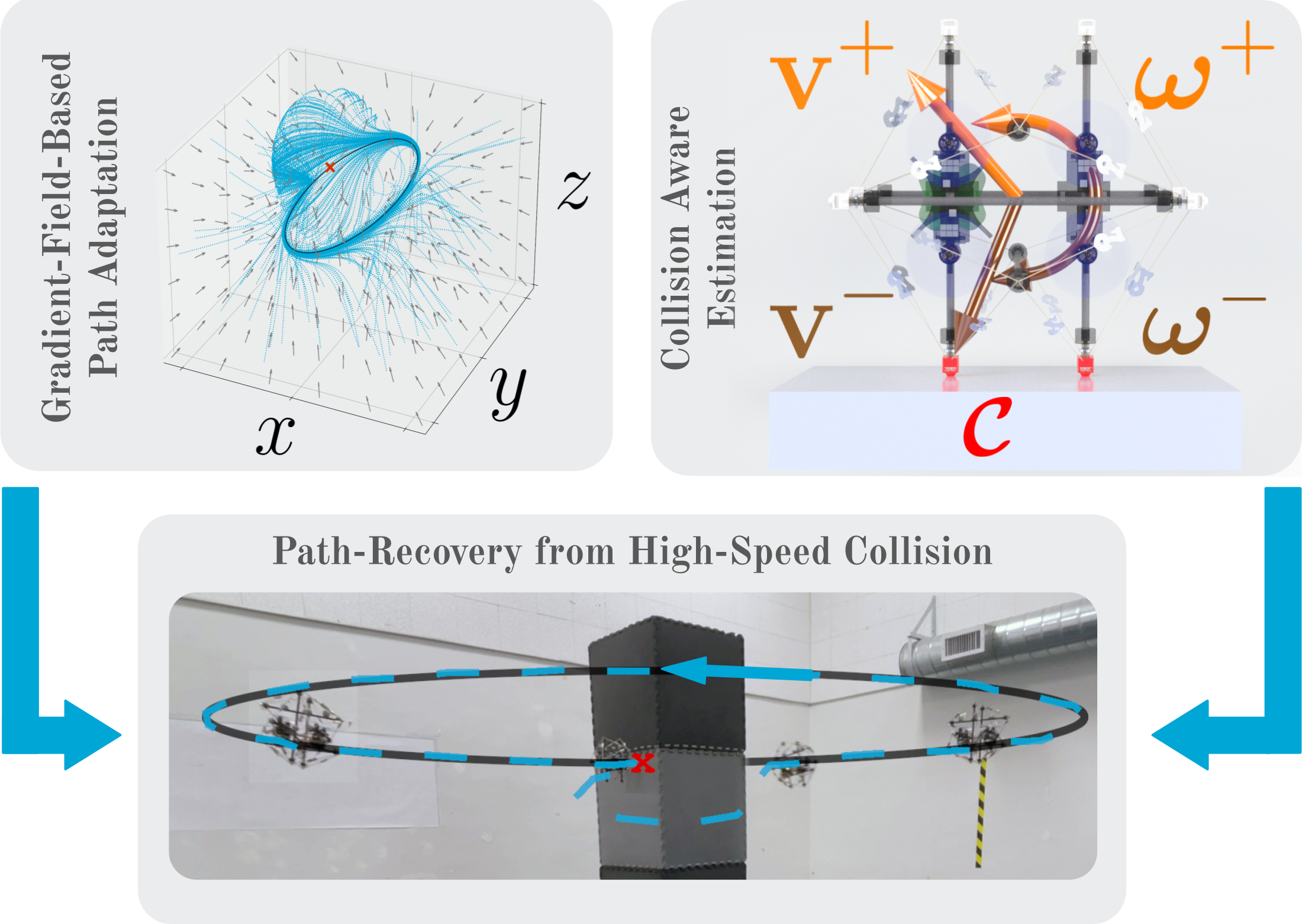
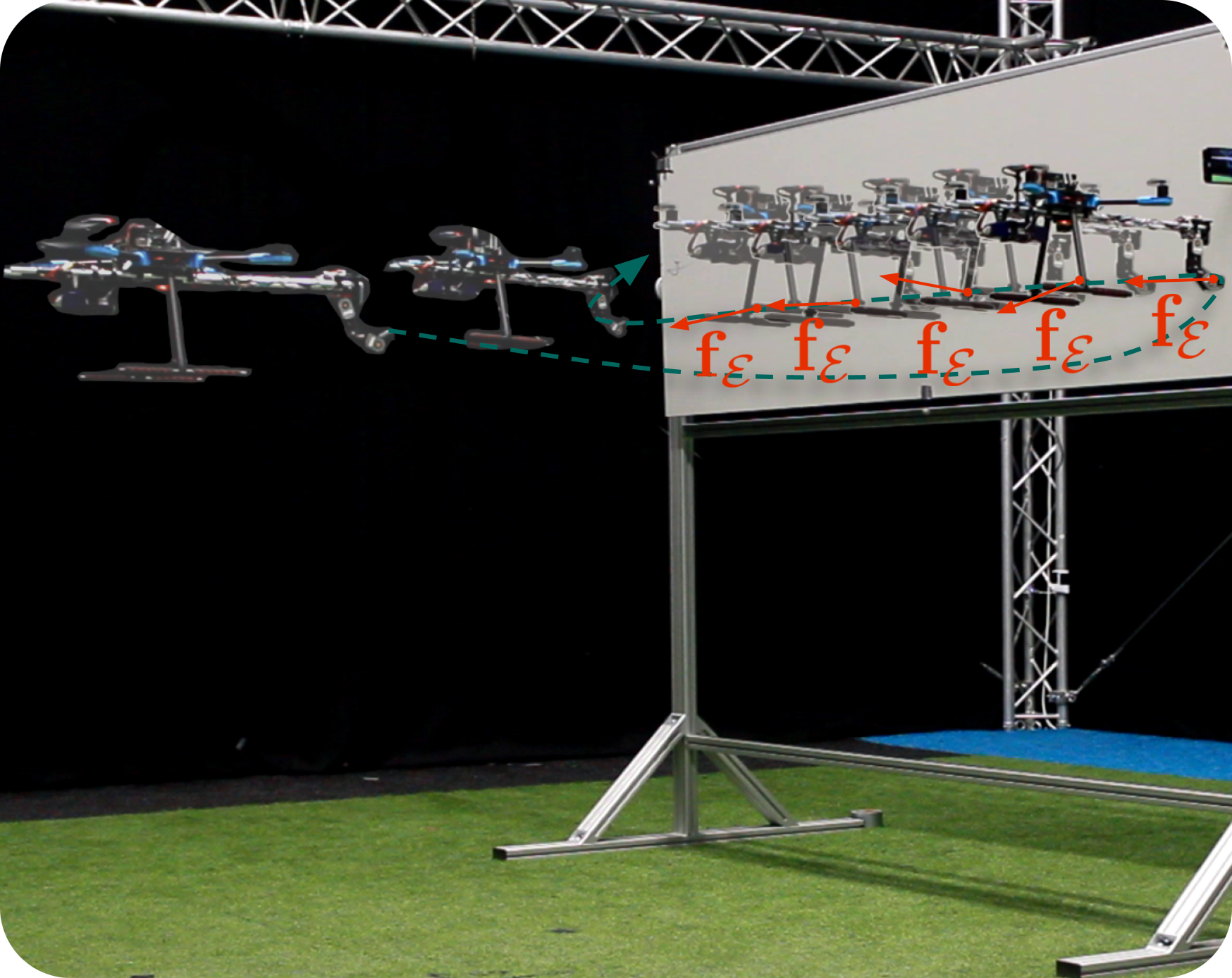
A Tactile Feedback Approach to Path Recovery after High-Speed Impacts for Collision-Resilient Drones
Anton Bredenbeck,
Teaya Yang,
Salua Hamaza,
Mark W. Mueller
MDPI Drones, December 2025:
website /
paper /
video /
github
A resource limited MAV uses binary tactile sensors to recover from high-speed collisions and adjust the a-priori planned path based on the collision location.
|
|
|
|
|

|
|
Other projects
|
EduBot: A ROS 2 library for education in robotic manipulation
GitHub
A small ROS 2 library that we use for teaching purposes at the Biomorphic Intelligence Lab.
In particular, it covers the hardware interface to a motor control board as well as ROS 2 based interface and a RVIZ 2 based visualization.
|

|
Unified Optitrack Clients
GitHub
co-maintained with Till Blaha
A unified C++ client for reading data from an OptiTrack motion capture system and
publishing it in various formats. The implementation emphasizes minimalism, speed,
and extensibility. It supports publishing data with applied rotations via UDP streams,
ROS 2 topics, and PX4-compatible ROS 2 topics, among others.
|
|